

Post by markus on Jan 30, 2008 20:30:31 GMT 1
for those who want to motorize their turrets:
you could simply connect them to 1 or 2 free channel(s) of your receicer or wire them in parallel to the rudder servo.
in this case the turrets will follow the transmitter's stick without any delay - this means the turrets can turn from left to right in less than a second.
if you want them to turn smooth with desired speed, here's how to modify them:
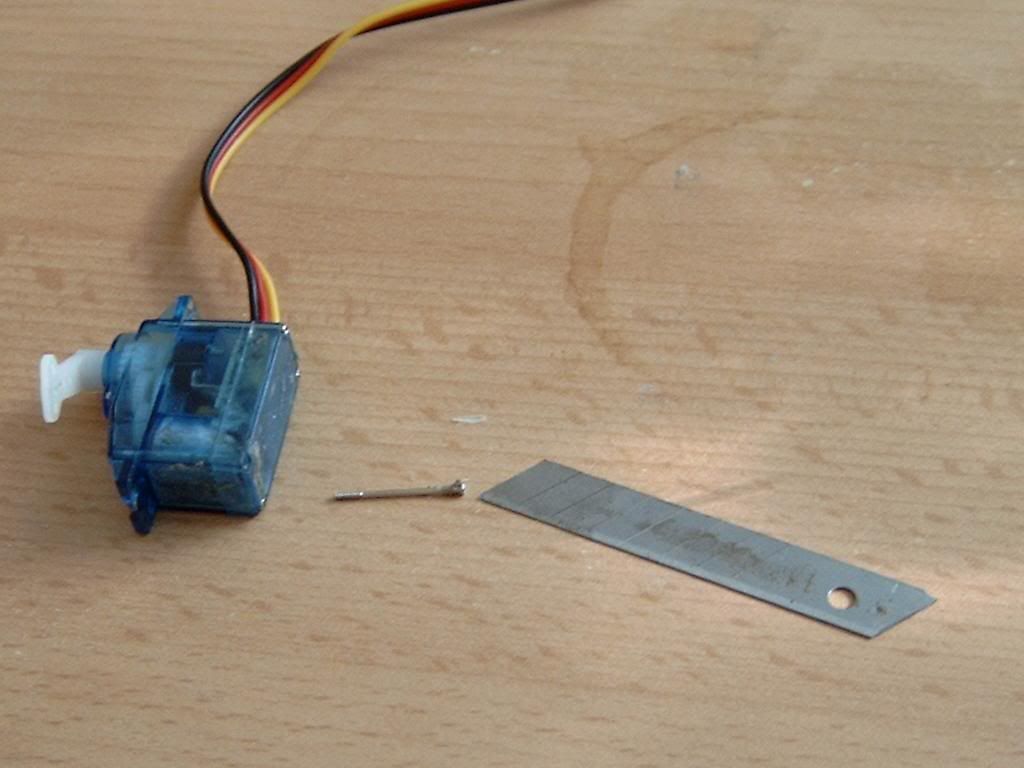
1. the mini servo itself.

1. open the servo with a very small screwdriver or a sharp blade
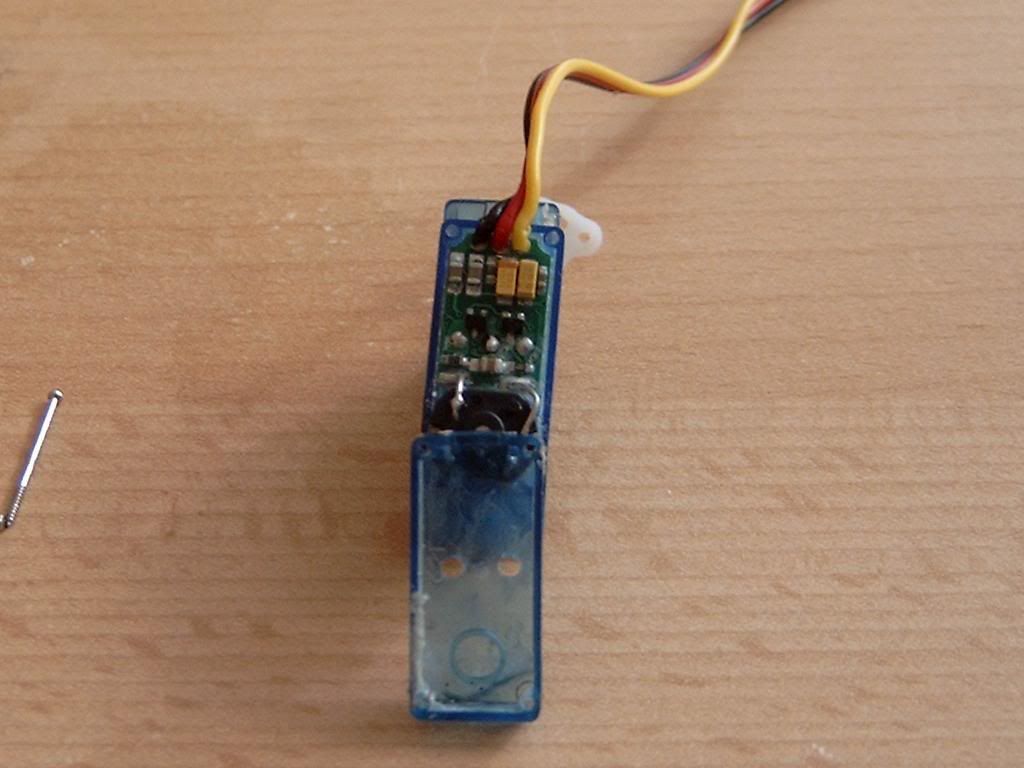
3. opened servo, pay attention to those small gears !!

4. drill 2 holes for the switch cables
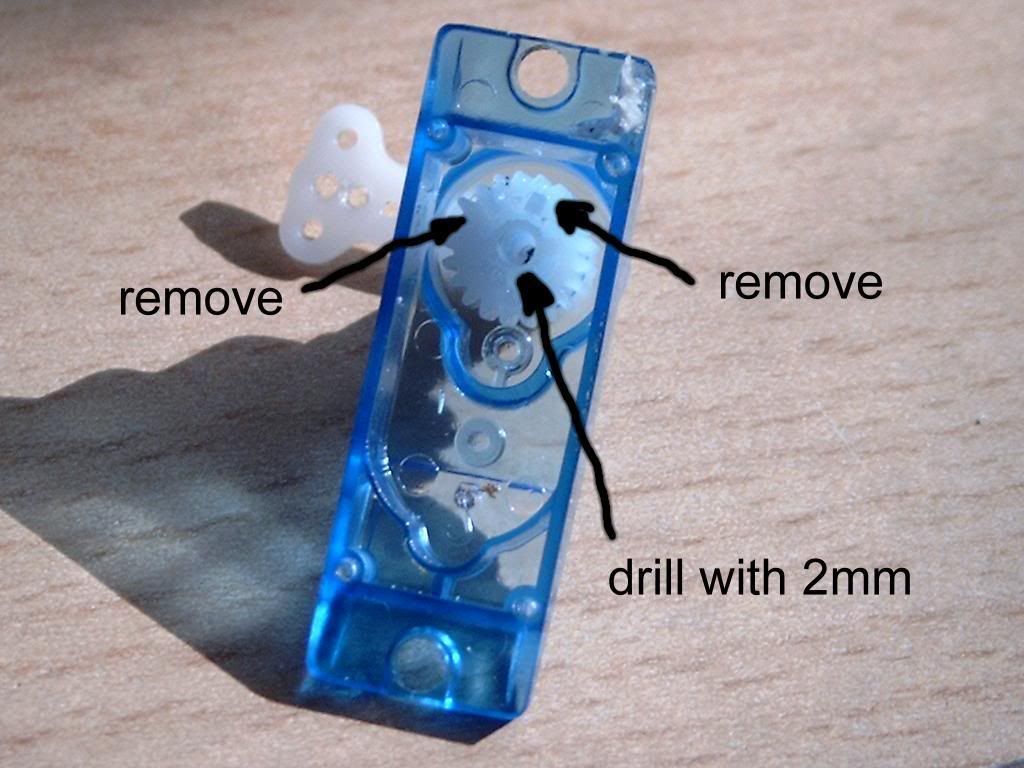
5. remove those 'noses' from the gear. these were used for stopping at end position.
drill a hole into the shaft to 'disconnect' gear from potentiometer.
6. solder 2 wire pairs onto the potentiometer's terminals.
a small drop of superglue keeps the potientometer arm in its middle position.
this 'neutral position' has to be exact and the same on all 4 servos, otherwise one or more turrets slowly start turning while other turrets are standing still.
best way to achieve the correct neutral position is to connect all 4 servos to the receiver and adjust each servo until none of them shows any movement.

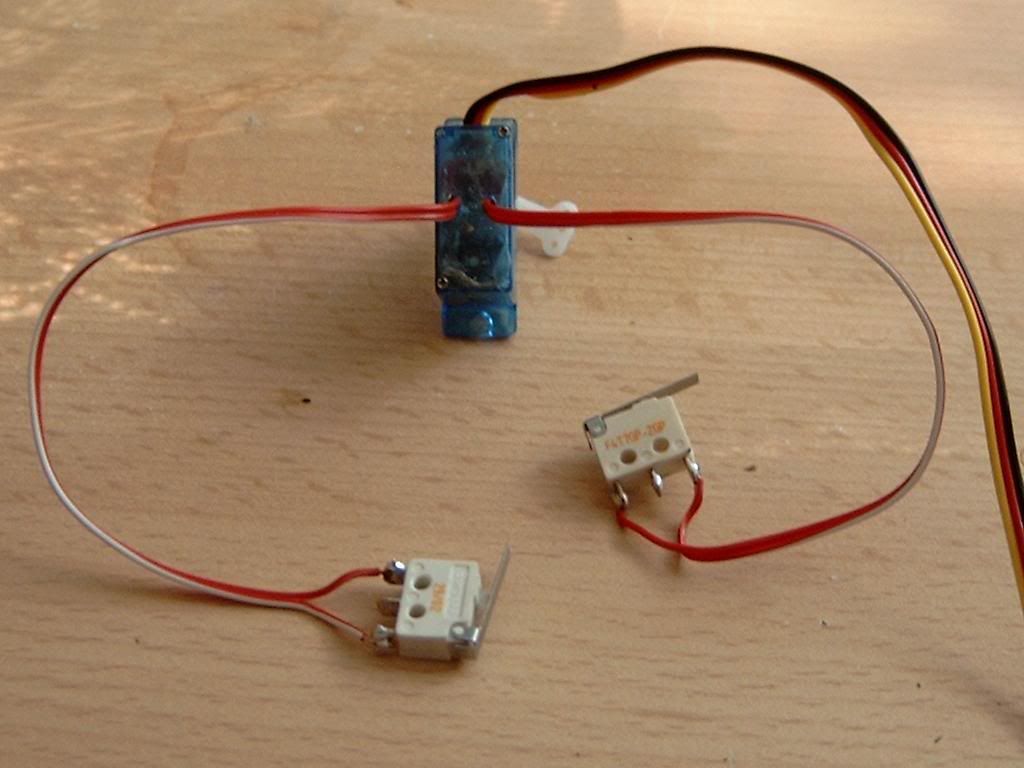
7. put the wire leads through the holes, reassemble the servo, solder 2 microswitches to the leads - switch terminals C (common) and NO (normally open).
triggering the correspondent microswitch immediately stops movement in that direction
8. DONE !! now you have a speed controlled turret drive without any restrictions in turning angle and automatic switch-off when turret reaches the desired end-position.
additionally the turret can stop and remain at any turning angle.

if all 4 turrets are controlled by one channel then 2 turrets have to turn in opposite direction.
this can easily be done by swapping the servo motor's terminals...
haven't decided by now if i'm going to motorize my turrets, so for any questions in mounting the modified servos ask don
(or take a look into his excellent turret threads)
markus
you could simply connect them to 1 or 2 free channel(s) of your receicer or wire them in parallel to the rudder servo.
in this case the turrets will follow the transmitter's stick without any delay - this means the turrets can turn from left to right in less than a second.

if you want them to turn smooth with desired speed, here's how to modify them:
1. the mini servo itself.
1. open the servo with a very small screwdriver or a sharp blade

3. opened servo, pay attention to those small gears !!
4. drill 2 holes for the switch cables
5. remove those 'noses' from the gear. these were used for stopping at end position.
drill a hole into the shaft to 'disconnect' gear from potentiometer.
6. solder 2 wire pairs onto the potentiometer's terminals.
a small drop of superglue keeps the potientometer arm in its middle position.
this 'neutral position' has to be exact and the same on all 4 servos, otherwise one or more turrets slowly start turning while other turrets are standing still.
best way to achieve the correct neutral position is to connect all 4 servos to the receiver and adjust each servo until none of them shows any movement.
7. put the wire leads through the holes, reassemble the servo, solder 2 microswitches to the leads - switch terminals C (common) and NO (normally open).
triggering the correspondent microswitch immediately stops movement in that direction
8. DONE !! now you have a speed controlled turret drive without any restrictions in turning angle and automatic switch-off when turret reaches the desired end-position.
additionally the turret can stop and remain at any turning angle.
if all 4 turrets are controlled by one channel then 2 turrets have to turn in opposite direction.
this can easily be done by swapping the servo motor's terminals...
haven't decided by now if i'm going to motorize my turrets, so for any questions in mounting the modified servos ask don
(or take a look into his excellent turret threads)
markus